일본 도쿄, 2021년 8월 26일 – 아스트로스케일의 수명 종료 서비스 시연(ELSA-d)은 8월 25일 수요일(UTC)에 실시된 시연에서 자사의 자기 포획 시스템을 사용하여 고객 우주선을 포획하는 능력을 성공적으로 테스트했습니다.
우주 쓰레기 제거 및 전반적인 궤도상 서비스의 주요 과제는 대상 물체와의 도킹 또는 포획입니다. 이번 시험 시연은 ELSA-d가 수명이 다한 위성과 같은 대상 물체와 도킹할 수 있는 능력을 성공적으로 검증하는 계기가 되었습니다.
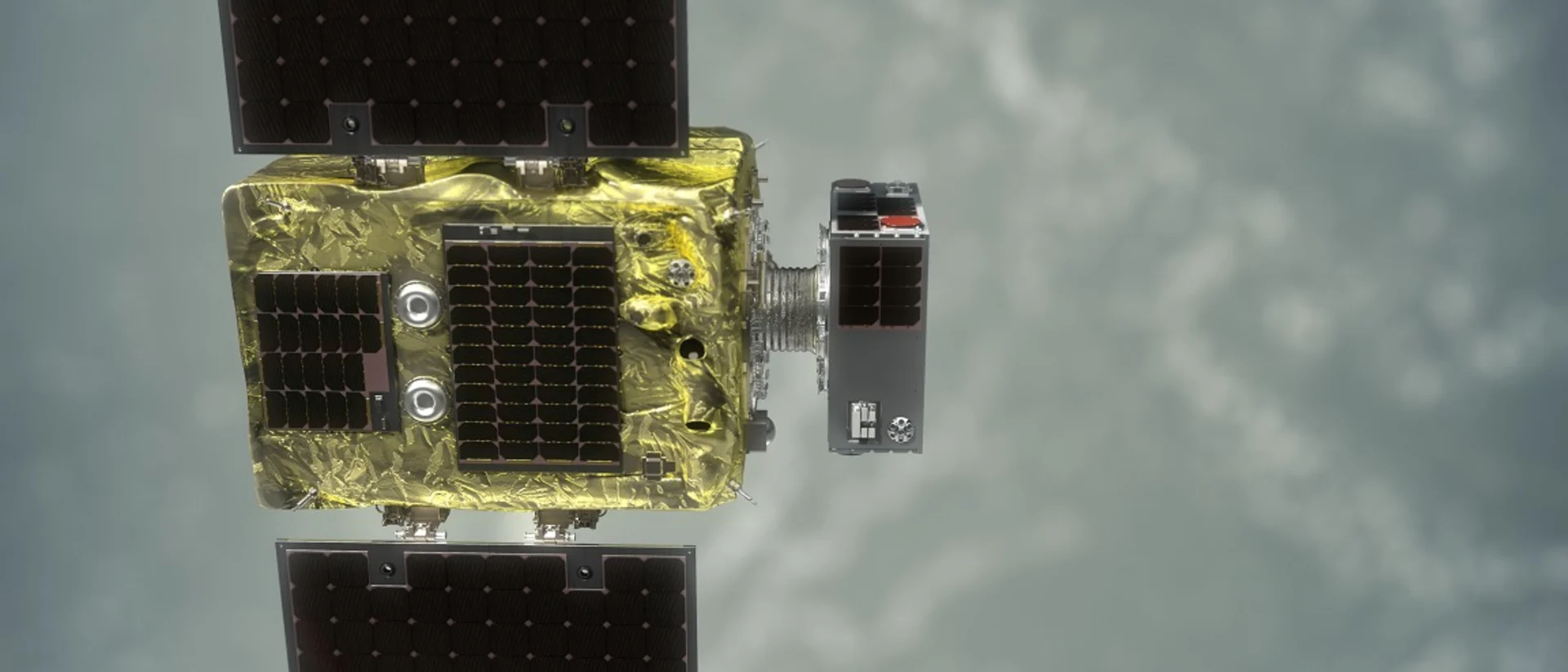
ELSA-d가 발사되어 가동되었을 때, 기계식 잠금 장치가 서비스 우주선과 클라이언트 우주선을 함께 고정했습니다. 이번 시연의 첫 번째 단계는 이 잠금 장치를 해제하는 것이었습니다. 잠금이 해제되자 자기 포획 시스템만으로 클라이언트 우주선을 서비스 우주선에 고정할 수 있게 되었고, 이는 ELSA-d가 향후 시연에서 클라이언트 우주선을 반복적으로 포획하고 분리할 수 있도록 준비하는 과정이었습니다.
클라이언트는 서비스 제공업체와 처음으로 분리되어 자기 포획 시스템의 유효성을 검증하기 위해 포획되었습니다. 분리 및 포획 기간 동안 아스트로스케일의 임무 운영 및 지상 시스템 팀은 랑데부 센서를 점검 및 교정하고 관련 지상 시스템 인프라 및 운영 절차를 검증했습니다.
이 단계의 성공적인 완료는 아스트로스케일의 선구적인 우주 쓰레기 제거 시연의 나머지 단계를 위한 발판을 마련했습니다. 엔지니어링 및 미션 컨트롤 팀은 현재 "회전 없는 포획"을 준비하고 있으며, 이 단계에서는 대상 물체를 더 먼 거리로 분리한 후, 온보드 자율 소프트웨어와 원격 측정 데이터 및 명령에 대한 고급 지상 처리 기술을 결합하여 도킹 및 재접속 방식을 구현할 것입니다. 이 시연은 향후 몇 달 내에 완료될 것으로 예상되며, 이후 "회전하는 포획" 단계가 이어질 예정입니다. 이 단계에서는 대상 물체가 제어되지 않은 상태로 회전하는 상황을 시뮬레이션합니다. 마지막 포획 시연은 "진단 및 대상 물체 수색"으로, 서비스 장치가 대상 물체를 검사하고, 원거리 수색을 시뮬레이션하기 위해 후퇴한 다음, 다시 접근하여 대상 물체를 재포획하는 방식입니다.
"이번 성과는 우주 공간에서의 랑데부 및 근접 운용, 그리고 포획에 필요한 모든 핵심 기술을 검증하는 데 있어 매우 훌륭한 첫걸음이었습니다."라고 아스트로스케일의 설립자 겸 CEO인 노부 오카다는 말했습니다. "우리는 자기 포획 기술을 입증하게 되어 자랑스럽고, ELSA-d를 통해 궤도상 서비스 사업을 더욱 발전시켜 나갈 수 있기를 기대합니다."
Translation
Translations are machine-generated and may not be perfect.
All Categories
Recent Posts


